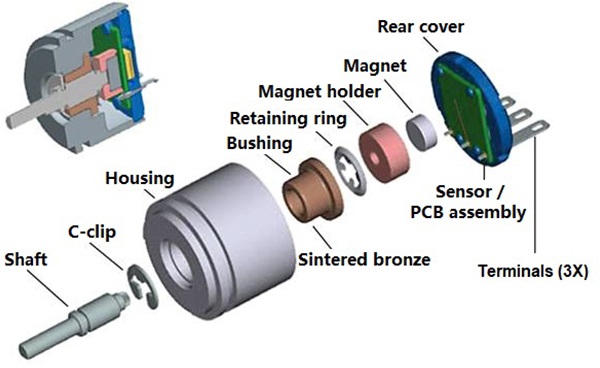
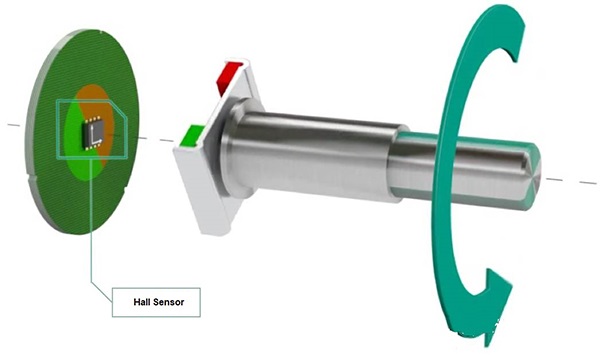
Jeśli masz możliwość zdemontowania magnetycznego enkodera obrotowego, zwykle zobaczysz strukturę wewnętrzną podobną do pokazanej powyżej. Enkoder magnetyczny składa się z wału mechanicznego, konstrukcji skorupowej, zespołu PCB na końcu enkodera i małegomagnes dyskowyobracający się z wałem na końcu wału mechanicznego.
W jaki sposób enkoder magnetyczny mierzy sprzężenie zwrotne położenia obrotu?
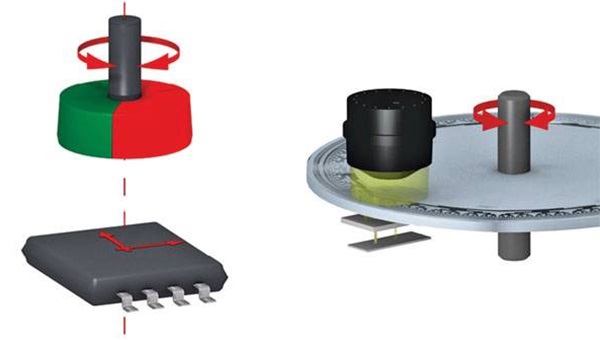
Efekt Halla: powstawanie różnicy potencjałów w przewodniku, w którym płynie prąd elektryczny, gdy pole magnetyczne jest przyłożone w kierunku prostopadłym do kierunku przepływu prądu.
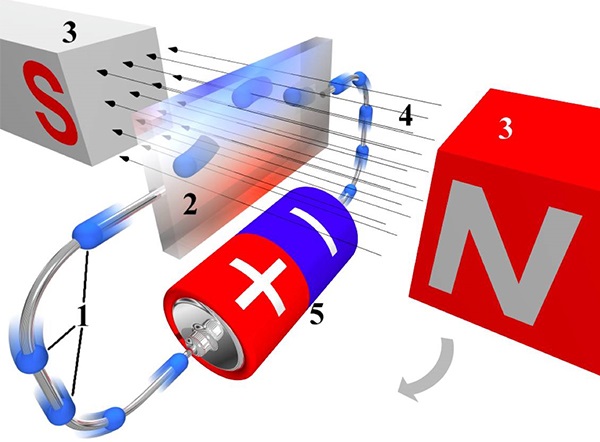
Jeżeli pole magnetyczne przyłożone do przewodnika zostanie obrócone w kierunku pokazanym strzałką powyżej, przy czym osią jest droga przepływu prądu, różnica potencjałów Halla zmieni się w wyniku zmiany kąta pomiędzy polem magnetycznym a przewodnikiem, a tendencja zmian różnicy potencjałów jest krzywą sinusoidalną. Dlatego na podstawie napięcia po obu stronach przewodu pod napięciem kąt obrotu pola magnetycznego można obliczyć odwrotnie. Jest to podstawowy mechanizm działania enkodera magnetycznego podczas pomiaru sprzężenia zwrotnego położenia obrotowego.
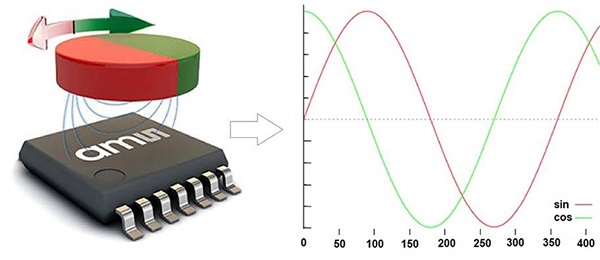
Podobnie jak w przypadku resolwera, który wykorzystuje dwa zestawy wzajemnie prostopadłych cewek wyjściowych, w enkoderze magnetycznym wymagane są również dwa (lub dwie pary) elementy indukcyjne Halla o wzajemnie prostopadłych kierunkach prądu, aby zapewnić unikalną zgodność pomiędzy pozycją obrotową pola magnetycznego i napięcie wyjściowe (kombinacja).
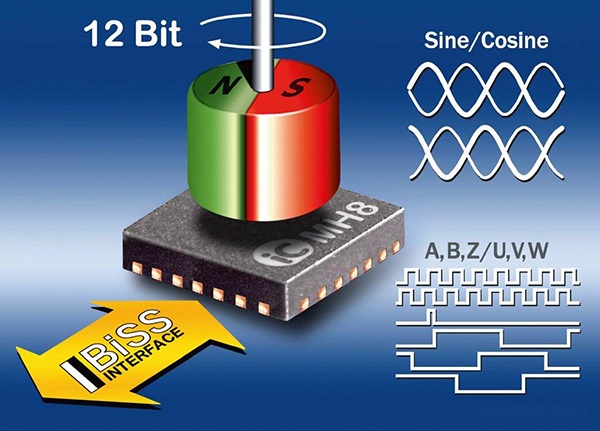
Obecnie czujniki Halla (chipy) stosowane w enkoderach magnetycznych mają na ogół wysoki stopień integracji, który nie tylko integruje komponenty półprzewodnikowe Halla i powiązane obwody przetwarzania i regulacji sygnału, ale także integruje różne typy modułów wyjściowych sygnału, takie jak analogowe sinus i cosinus sygnały cyfrowe, sygnały poziomu o fali prostokątnej lub jednostki wyjściowe komunikacji magistralnej.
W ten sposób zainstaluj magnes trwały, np. spiekany magnes neodymowy, który generuje pole magnetyczne na końcu obrotowego wału enkodera, umieść wspomniany powyżej chip czujnika Halla na płytce drukowanej i zbliż się do magnesu stałego na końcu enkodera wał według określonych wymagań (kierunek i odległość).
Analizując sygnał napięciowy wychodzący z czujnika Halla przez płytkę drukowaną, można zidentyfikować położenie obrotowe wirnika enkodera.
Struktura i zasada działania kodu magnetycznego decydują o specjalnych wymaganiach dotyczących tego magnesu trwałego, na przykład o materiale magnesu, kształcie magnesu, kierunku namagnesowania itp. Zwyklediametralnie namagnesowany magnes neodymowyDysk jest najlepszą opcją z magnesem. Firma Ningbo Horizon Magnetics ma doświadczenie w zaopatrywaniu wielu producentów kodów magnetycznych w niektórych rozmiarachmagnesy dyskowe o średnicy neodymowej, Tarcze o średnicy D6x2,5mm i D10x2,5mm. Najpopularniejsze modele to magnesy neodymowe.
Można zauważyć, że w porównaniu z tradycyjnym enkoderem optycznym, enkoder magnetyczny nie potrzebuje złożonego dysku kodowego i źródła światła, liczba elementów jest mniejsza, a struktura wykrywania jest prostsza. Co więcej, sam element Halla ma również wiele zalet, takich jak solidna konstrukcja, mały rozmiar, niewielka waga, długa żywotność, odporność na wibracje, nie boi się kurzu, oleju, pary wodnej i zanieczyszczeń mgłą solną lub korozji.
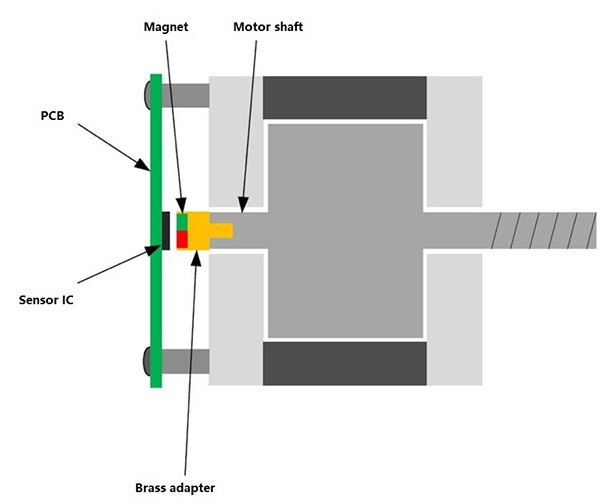
Gdy do sprzężenia zwrotnego położenia obrotowego silnika elektrycznego zostanie zastosowana technologia enkodera magnetycznego,spiekany cylinder z magnesem NdFeBenkodera magnetycznego można zamontować bezpośrednio na końcu wału silnika. W ten sposób można wyeliminować przejściowe łożysko sprzęgające (lub sprzęgło) wymagane przy stosowaniu tradycyjnego enkodera ze sprzężeniem zwrotnym i uzyskać bezdotykowy pomiar położenia, co zmniejsza ryzyko awarii (lub nawet uszkodzenia) enkodera na skutek wibracji wału mechanicznego podczas działanie silnika elektrycznego. Dlatego pomaga poprawić stabilność pracy silnika elektrycznego.
Czas publikacji: 21 lipca 2022 r